
Программа для определения углов конуса.
Книга. Проектирование станочных приспособлений. Автор А.П.Белоусов.



Как прочитать кинематическую схему? (Страница 3)
Также стоит отметить, что большое количество условных обозначений различных механизмов в кинематических схемах представлено в специальном альбоме “Металлорежущие станки” (автор Кучер А.М.). После определения условных обозначений механизмов и элементов в качестве примера, рассмотрим кинематическую схему токарного станка с ЧПУ и объясним принцип его работы (см. рис.8).
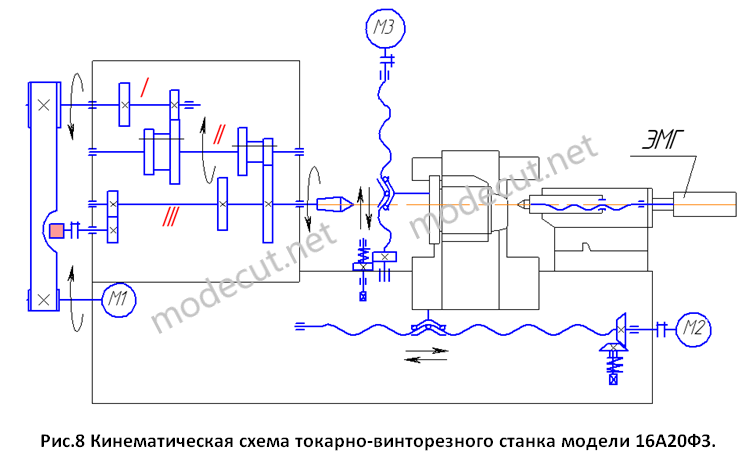
Двигатель “М1” предназначен для вращения детали, которая крепится к шпинделю станка (вал III). Двигатель “М1” через ременную передачу передает вращение на вал I. C помощью цилиндрических зубчатых передач, вращение от вала I, передается через вал II на шпиндель станка (вал III). На валу II расположено два блока зубчатых колес, каждый из которых состоит из двух спаренных шестерен. Эти блоки подвижны и при ручном переключении перемещаются по валу II, сцепляясь с другими шестеренками (валов I и III). Тем самым меняется скорость вращения детали. От шпинделя станка (вал III) через зубчатую передачу вращение передается на считывающий датчик (выделен на схеме красным), который фиксирует реальное число оборотов шпинделя (необходимо для нарезания резьбы). Движение суппорта в продольном направлении по направляющим станка осуществляется с помощью двигателя “М2” и ШВП. Движение верхних салазок станка в поперечном направлении осуществляется с помощью двигателя “М3” и ШВП. Для возможности ручного перемещения суппорта и салазок между ШВП и двигателями установлены зубчатые пары, у которых ведущие шестерни подпружинены и не находятся в зацеплении при нормальной работе станка. Перемещение пиноли задней бабки осуществляется с помощью электромеханической головки “ЭМГ” и ходового винта.